LX_RoCoN
Motion and Robotic Controller
The LX_RoCoN is complete 4 axes motion/robotic control system for DC, three-phase BLDC/PMSM and two-phase/stepper motors up to 100 Watts. It can be extended by addon top level board to provide application specific hardware and interfaces. One option is an extension board providing four more IRC sensors interfaces. Up to 8 DC motor axes can be controlled in that setup.
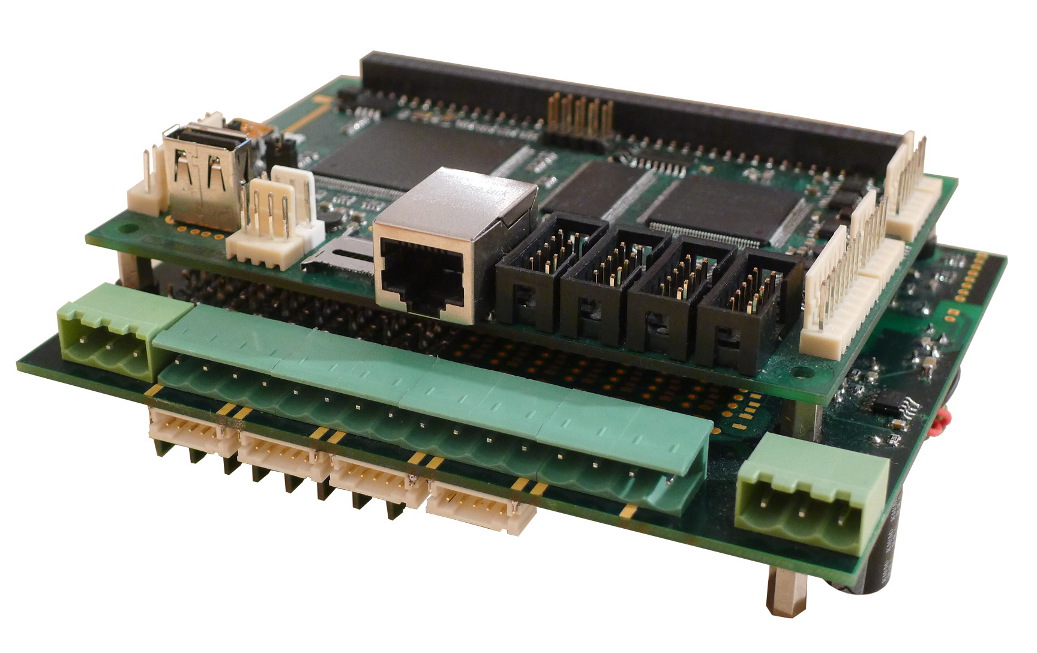
LX_RoCoN Boards Stack (PCB kit) (Larger Image)
The system design follows tradition of more previous generations of PiKRON's robotic controllers serving for decades in industrial and education environments. Previous systems examples
- MARS 8 indudustrial multi exes controller
- motion controllers designed and used in all PiKRON's laboratory and medical instruments
- customized motion controllers for many special applications
The basic configuration of LX_RoCoN consists of two or three boards:
| LX_CPU (120mm x 80mm x 20mm) | ||
| Click to read more about LX_CPU board | ||
| NXP LPC1788/LPC4088 (Cortex-M3/M4F) | ||
| 512 kB on-chip Flash program memory | ||
| Xilinx XC6SLX9 FPGA (with synthetized 50 MHz drivers control coprocessor) | ||
| four IRC sensors interfaces with two phases, index and mark differential inputs per axis | ||
| 32 MB SDRAM on 32 bit bus | ||
| 8 MB serial Flash | ||
| multiple serial ports, one galvanic isolated | ||
| ETHERNET 100 Mbit/s interface | ||
| USB device and host interfaces | ||
| CAN ganvanic isolated interface | ||
| 5 and 3.3 VDC levels SPI interfaces | ||
| I2C, AD converter more pins available for custom applications | ||
| LX_PWR (130mm x 100mm x 40mm) | ||
| isolated power stage with 16 power outputs/half-bridges up-to to 30 VDC | ||
| 5 A maximal current and over-current protection | ||
| the power stage can drive up-to 4 stepper motors or BLDC/PMSM motors or up-to 8 DC motors or any combination of these types | ||
| DCDC converter from 12 up-to 30 VDC to 5 VDC for CPU, 5 VDC for isolated | ||
| communications and helper supply for bridges. | ||
| unique current measurement system for each controlled output/phase | ||
| optional LX_IRC (120mm x 35mm x 12mm) | ||
| addon board with four additional IRC sensors interface | ||
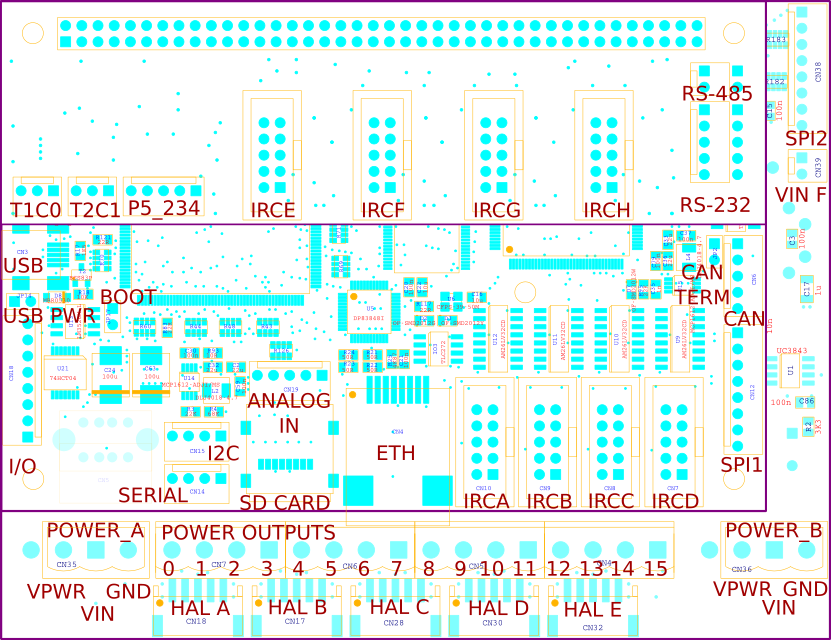
LX_RoCoN PCB Stack Connections (PDF file)
The control firmware includes position and velocity per axis control as well as coordinated motion in a axes group selected from all exes (up-to four or eight). The coordinated motion uses linear or up-to 4-th order polynomial interpolation with large segments queue and smooth/limited velocity and acceleration transition between segments. If the trajectory is planed with minimal or no discontinuity of axes tangential velocity between end and following segment start point then motion is smooth and the speed does not lower before arrival into segments joint position.
More complex systems with local keyboard, display, digital and analog I/O control CAN, ETHERNET TCP/IP or RS485 network integration can be prepared on demand.
System can be inbuilt into box of size 120mm x 240mm x 300mm. All motor connectors and some I/O connectors of control electronic kit are accessible at front panel of the box. Power supply can be included in box too.
Some parts of control system can be delivered and used stand-alone. The LX_CPU boards can be used for laboratory instrument or other embedded devices control or for educational purposes.
The complete LX_RoCoN system with 300 Watt switched power supply inbuilt in an enclosures made of metal is provided for laboratory environment or for use as standalone robotic controller unit. System can control upto 8 DC or 4 PMSM/BLDC motors. The axes are paired to allow use alternatives as two DC outputs or one BLDC/PSMS or stepper motor output.
| Type | Position | Phases | Control | REGMODE | Boxed LX RoCoN axes | |||||||
| A | E | B | F | C | G | D | H | |||||
| DC motor | IRC | 1 | 2x PWM Voltage | 4 | A | E | B | F | C | G | D | H |
| BLDC/PMSM | IRC+HAL | 3 | 3x PWM Voltage | 5 | A | B | C | D | ||||
| BLDC/PMSM | IRC+HAL | 3 | 3x PWM DQ vector | 6 | A | B | C | D | ||||
| Stepper | IRC | 2 | 4x PWM Voltage | 2 | A | B | C | D | ||||
| Stepper | IRC | 2 | 4x PWM DQ vector | 7 | A | B | C | D | ||||
| Stepper | None | 2 | 4x PWM DQ vector | 8 | A | B | C | D | ||||

LX_RoCoN as Boxed Version
Source code for the motion controller can be found at GitLab repository https://gitlab.com/pikron/projects/lx_cpu/lx-rocon